
OrchTech
协律科技
JEPA 世界模型驱动的开放世界机器人预测式决策系统
Orchestrating Perception · Prediction · Action
协律感知、预测与执行 —— 让机器人与环境、与人协律而行
Confidential
请输入机构专属访问密码,验证通过后5分钟内无需重复输入。
JEPA 世界模型驱动的开放世界机器人预测式决策系统
Orchestrating Perception · Prediction · Action
协律感知、预测与执行 —— 让机器人与环境、与人协律而行
The Thesis
具身机器人的核心命题,正从固定场景下的桌面级操作,迈向开放世界中的长程移动操作。
而以 VLA、WAM 为代表的模仿学习端到端动作生成范式,正逐渐触及其在这一背景下的泛化性瓶颈。
长程富接触交互任务正带来两个值得重新思考的问题:一是面对跨时间尺度的推理、规划与控制,具身系统是否需要从单体端到端走向更显式的分层;二是大模型在具身系统中究竟应继续依赖专家轨迹直接生成动作,还是更多承担理解世界、预测变化并服务规划的角色。
两条逐步清晰的技术主线
主线一 · AGENTIC
系统架构从更大的端到端动作模型,转向显式的分层分工。
语言模型进入机器人决策栈
双系统成型:慢速语义推理 + 快速动作专家
同一冻结 VLA 加入编排器,LIBERO-PRO 12.8% → 53.3%
ER2 语义规划与进度跟踪,VLA 负责执行
主线二 · JEPA
世界模型从预测像素,转向预测世界更本质的变化,并与 motion planning 解耦。
2018 年图灵奖得主提出:预测表征而非像素
把「预测未来像素」替换为「预测未来表征」
冻结视觉基座 + latent dynamics,验证 zero-shot planning
百万小时视频预训练 + 62h 机器人数据
仅两项 Loss、约 1500 万参数,规划降至 1 秒内
两条主线的完整技术 review 见 Data Room
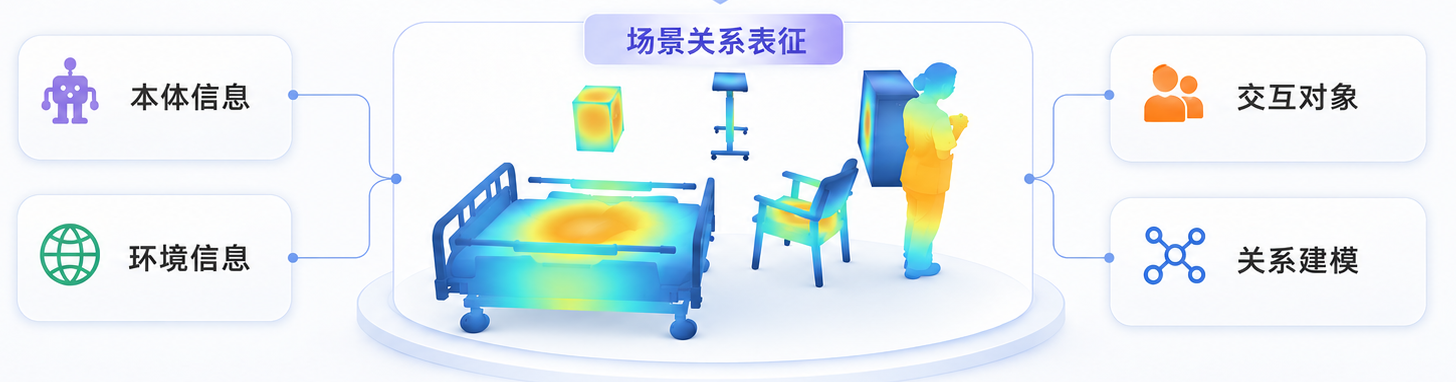
协律科技首个提出以「关系 / Relation」作为核心世界表征,由 JEPA 世界模型担任独立预测层,构建从场景理解到长程富接触交互执行的 Agentic System
场景理解Relation 驱动的开放世界表征
JEPA 预测与规划预测关系演化,规划动作意图
动作执行高频技能调度与跨本体闭环
HKUST Robotics 核心班底,整建制 PhD 团队。具备感知、理解、规划、控制系统级全栈能力,在开放场景交互式移动操作方面的积累处于业内领先水平

战略 · 产品路线 · 预测器与规划器
哈佛访问学者 · 新国立博后 · 港科大博士 · UCSD 硕士

机器人总负责 · 技术架构与系统闭环
港科大博士后 & 博士 · 中科院大学硕士 · 戴盟联创 · 小鹏

具身模型总负责 · JEPA 预测器训练
港大博士 · 港科大硕士 · 上海 AI Lab

香港科技大学(广州)机器人与自主系统学域主任 · 长聘副教授
智能自动驾驶技术中心主任 · 国家级人才计划 · 90 后 4 年 Early Tenure
公司是马骏教授唯一绑定的产业转化平台,创始人为其第一位学生。核心团队同门并肩多年,决策与执行同频
按三层 Agent 分工,各方向均有负责人牵头,层间以统一的动作意图对接
关系表征与场景结构化
于靖文负责人
港科大 ECE 博士(谭平教授 / 张宏院士)· 华为 2012 实验室 · 深圳市机器人视觉与导航重点实验室
11+ 顶刊顶会(IJRR / T-ASE / RA-L)· IROS 2025 OWN Workshop 最佳论文
JEPA 预测器 + 规划器
曹嘉航负责人 · 预测器
港大博士 · 上海 AI Lab · 腾讯混元专项(全国 44 人)
50+ 顶刊顶会 · Scholar 900+ 引用
黄稹敏规划器
港科大博后 & 博士(马骏 / 沈劭劼)· UCB 访问学者 · 广汽研究院 L4 自动驾驶
15+ 顶刊顶会,一作 5 篇(T-RO / T-ITS / T-VT / ICRA)
技能调度与跨本体执行
宋志城负责人 · 整机运控
港科大博士 · 哥大硕士 · 逐际动力 · 戴盟硬件负责人
轮腿机器人 · 可重构底盘 · 移动操作整机
毕志海移动操作
港科大博士 · 复旦硕士
19 篇顶刊顶会,一作 4 篇 · ALORE 一作
徐天遨灵巧手
ETH 硕士(Marco Hutter · RSL 实验室)· 新国立在读博士
足式强化学习控制 · 灵巧手遥操作与控制
海外三类均有顶级机构推进;国内创业公司高度集中在前两类
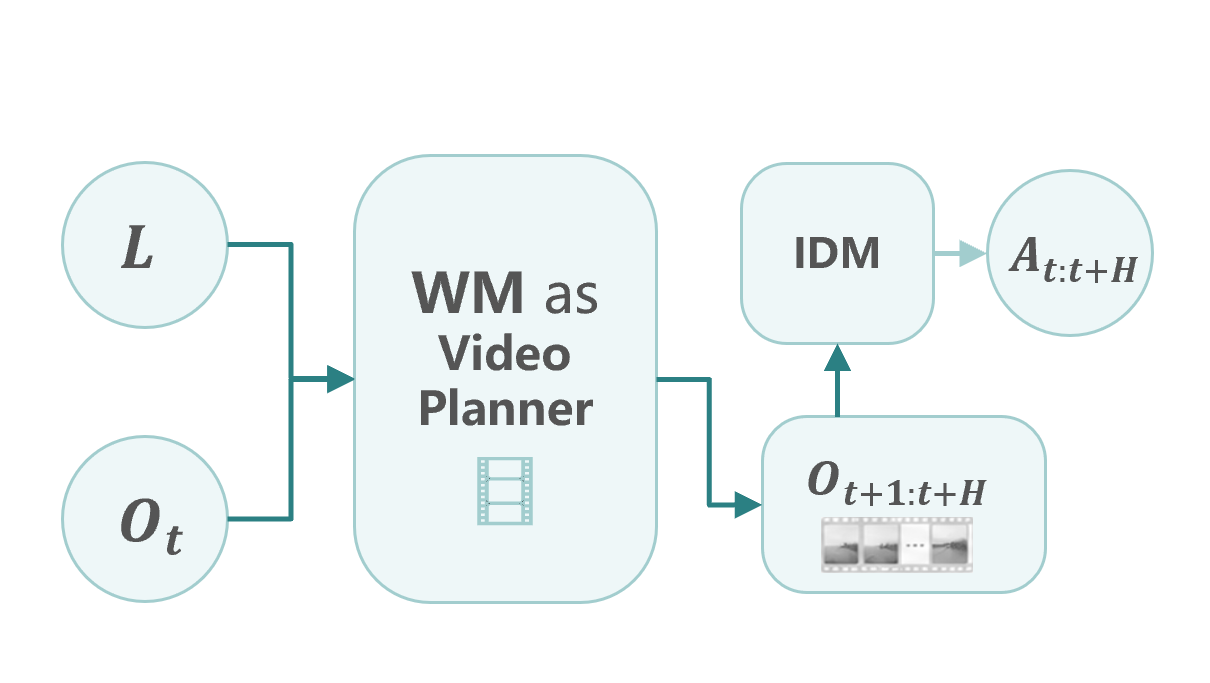
视频规划
作为视频规划器与逆动力学模型(IDM)联合使用,由渲染预测的未来视觉状态反推可行动作,常用于灵巧手操作。
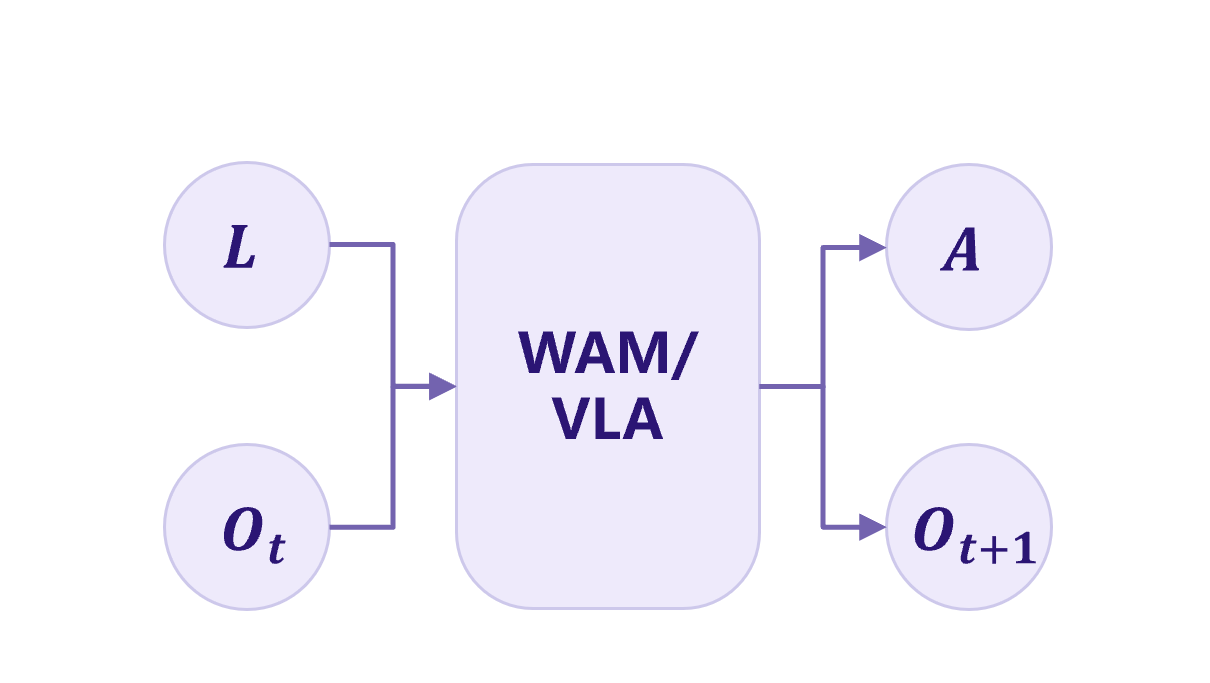
端到端规划
依靠大量专家数据覆盖任务分布,端到端生成动作,跳过机器人"感知-预测-规划-执行"闭环系统的中间环节,适用于固定场景固定任务。
预测 + 规划
基于 JEPA 的隐空间状态预测器 + 规划架构,预测器层理解不同动作下交互状态如何演化,规划层基于预测结果规划最优动作并完成闭环执行。
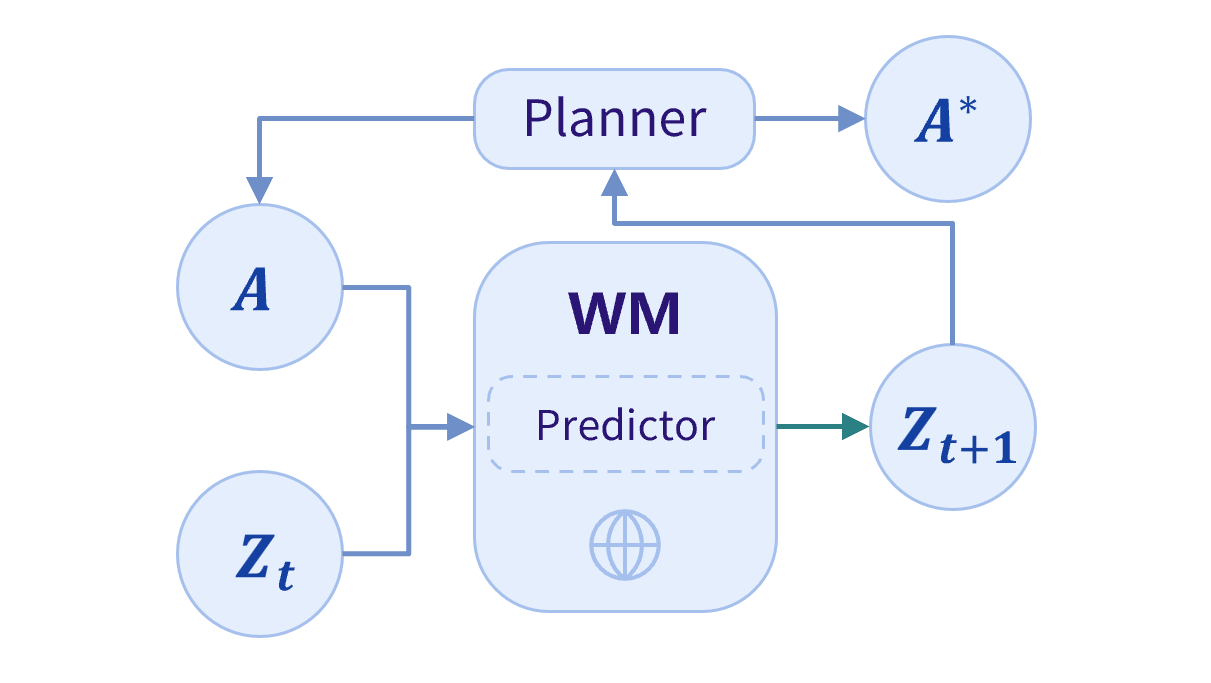
第三类将预测器与规划控制器解耦,兼顾 Model 作为预测器的跨场景推演能力与系统级高频鲁棒闭环执行能力。国内已有公司使用隐空间世界模型建模,但最终多采用端到端 / RL 的方式监督动作;而协律科技通过团队扎实的机器人Planning 功底,将可预测世界的交互组合规划成最优动作路径。以系统方式呈现 JEPA + Planning,国内仅协律科技。
分层不是单一架构,而是三类不同维度问题的叠加
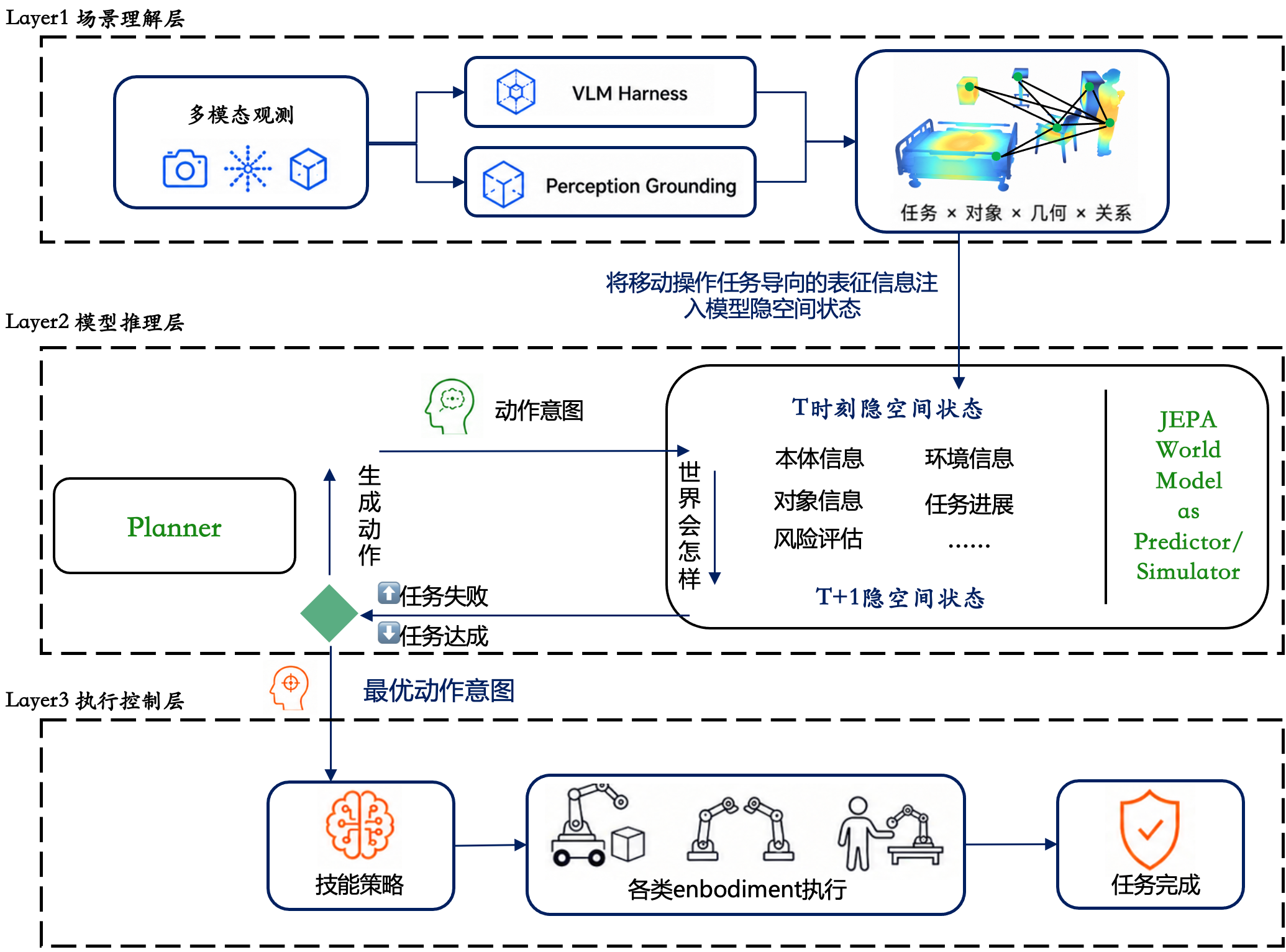
世界是什么样,机器人应该做什么
基于 relation 的表征:从视觉、语言与 3D 信息中提取空间、拓扑、因果、通行与交互关系,过滤与决策无关的细节,只保留规划真正需要的信息。
做了之后会发生什么,据此该走哪条路径
基于 JEPA 的 planning:Predictor 学习「动作如何改变世界」而非「专家会怎么做」,天然覆盖开放世界的长尾交互;Planner 结合预测演化 optimize 最优动作意图。
如何以高频、稳定、安全的方式执行
动作意图驱动的技能调度:按意图调度技能库,结合全身控制完成跨 embodiment 闭环执行,执行结果回传上层继续判断与重规划。
差异化 01
以 Relation 作为核心世界表征
学什么 · Relation 表征
世界最本质的表征不是像素,也不是把视觉、语言和物理属性全部塞进模型,而是机器人、物体与环境之间的关系。系统从视觉、语言和 3D 信息中提取空间、拓扑、因果、通行和交互关系。
怎么学 · JEPA
让 JEPA 学习这些关系在机器人动作作用下如何变化,再结合预测和规划产生动作。不以专家数据为前提,因此更容易迁移到新的任务、物体和场景。
以椅子为例
不需要预测椅子移动后的每一个像素,只需要判断
椅子是否更靠近桌子
移开后通道是否打开
当前动作是否让任务更接近完成
既过滤了与决策无关的细节,又保留了规划真正需要的信息,使同一套模型可以跨物体、跨任务和跨场景复用。布料操作中的 topology,就是关系表征已经跑通的一个特例。
差异化 02
让不同尺度的问题,在合适的层解决
单体端到端模型
协律 · 分层协同系统
跨任务迁移
本体相关 · 高频闭环
✕尺度冲突
长程推理与接触控制,压进一个网络互相拖累
✓按尺度分工
上层泛化关系,底层泛化控制
✕误差无缓冲
仿真与现实的接触差异,直接传导为执行失败
✓底层吸收 gap
高频闭环解决真实接触差异
✕牵一发动全身
加技能、换本体,任何改动都要整套重训
✓各层独立迭代
升级单层即可,无需从头重训
壁垒 01
面对开放世界无法穷举的任务空间,仿真交互数据是更低成本、更能泛化的路线
模仿学习积累的是示教轨迹,会随任务与本体变更而贬值;关系表征与数据管线可跨物体、跨任务、跨场景复用,是真正随时间复利的资产。
壁垒 02
模型团队往往缺少运动规划、复杂接触、高频控制的经验;传统机器人团队能完成单点动作,却难以用模型实现跨任务泛化。
长程连续移动操作
真机连续搬运 32 把椅子、近 40 分钟不中断,全程实时纠偏
真实有人环境作业
办公场景边移动边操作,处理多重接触与扰动
灵巧手精细操作
物体旋转等接触丰富的精细操作
跨本体执行
同一策略直接驱动腿式整机完成同类任务
单策略跨物体泛化
同一 policy 推形状、材质、重量各异的物体
模型泛化与机器人工程的深度耦合:既能应对变化与扰动,也能在复杂接触和长程任务中稳定运行。
能力已分项验证完毕,下一步合并为最小系统闭环,并逐步走向场景落地
已实现 · 能力验证
规划中 · 落地路线
轮式双臂真实场景 demo:推开门、台面清理、桌椅复位——模仿学习做不到的泛化与抗干扰
会议室整理、货架理货、订单拣选
办公 · 商超 · 零售
泛 To C,开放式任务泛化
家庭 · 康养 · 办公
概念形态与真机原型

概念形态
Concept
原型 · 上下坡
Prototype
原型 · 不平整地面
Prototype
Concept
轮式底盘与双臂统一调度,高度可调,适配办公、商超、家居等空间。
Performance
上下坡、不平整地面等移动能力,以及双臂协同操作,均已在真机验证。